关于作者
关于造父智能
业务场景与核心挑战
造父智能(哈啰robotaxi)在阿里云上进行自动驾驶训练的场景介绍
整体架构总览
五层数据流架构

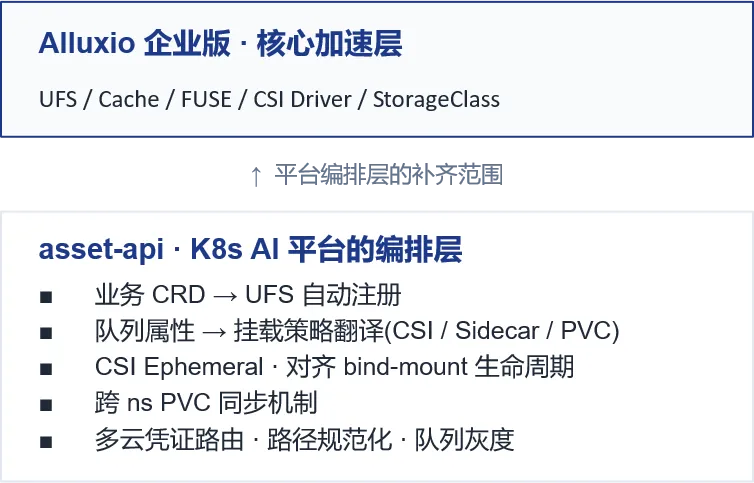
核心能力框架
4点摘要对齐:
3条生产经验:
核心技术方案
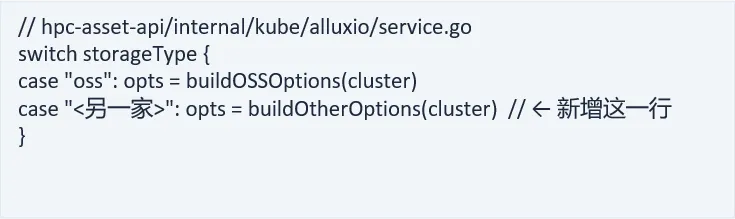
UFS自动注册:从声明式到编排式的演进

挂载策略翻译:节点异构长期约束下的策略抽象


三种策略的适用域与代价:
subpath 失效与 CSI Ephemeral 自愈:突破 FUSE 自愈边界
根因分析:问题在 bind-mount 层
解决方案:对齐 Pod 生命周期

跨 NS PVC 自动同步:补齐 K8s 原生分发机制
解决方案
生产实践经验
多云凭证治理

路径规范化

队列级灰度
总结与展望